Loading...
Searching...
No Matches
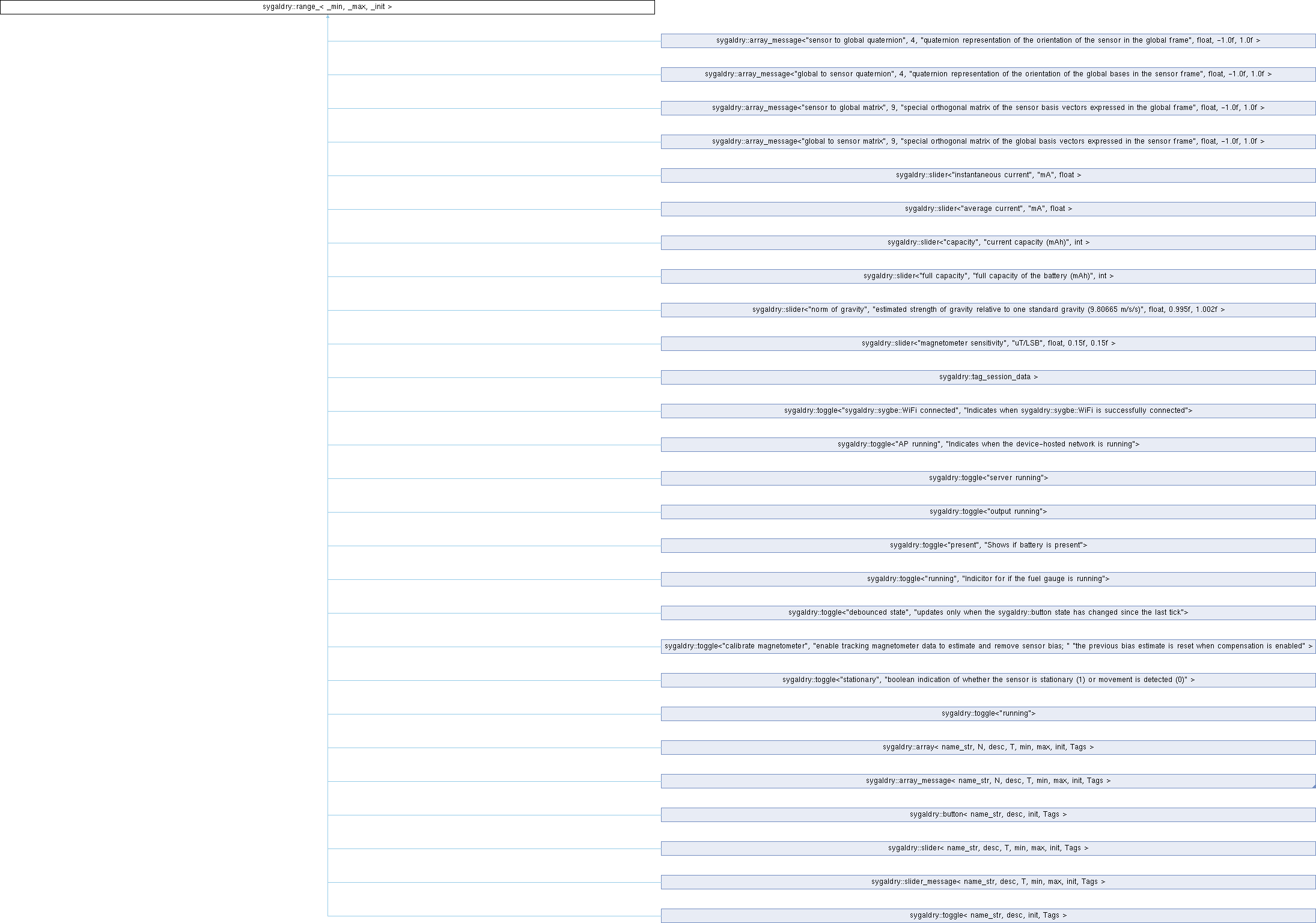
sygaldry::range_< _min, _max, _init > Struct Template Reference
Document the expected minimum, maximum, and initial value of an endpoint. More...
Inheritance diagram for sygaldry::range_< _min, _max, _init >:
Detailed Description
template<num_literal _min, num_literal _max, num_literal _init = _min>
struct sygaldry::range_< _min, _max, _init >
struct sygaldry::range_< _min, _max, _init >
Document the expected minimum, maximum, and initial value of an endpoint.
The documentation for this struct was generated from the following file:
- sygaldry/sygah-endpoints/sygah-endpoints.hpp